发表机构:中国科学院遗传与发育生物学研究所,中国科学院自动化研究所
作 者:许操(通讯作者)杨明浩(共同第一作者)
人工智能(AI)和机器人为向精准农业转型提供了巨大机遇,有助于提高作物产量、降低成本并推广可持续实践。然而,许多作物性状阻碍了基于人工智能的机器人的应用。其中一个瓶颈是具有凹陷柱头的花形态,这会在杂交育种过程中给去雄和授粉带来困难。在该研究中,研究人员通过将基因组编辑技术与基于人工智能的机器人相结合,研制了世界首台可自动巡航杂交授粉的智能育种机器人——“吉儿”(GEAIR),首次提出了作物-机器人协同设计策略。
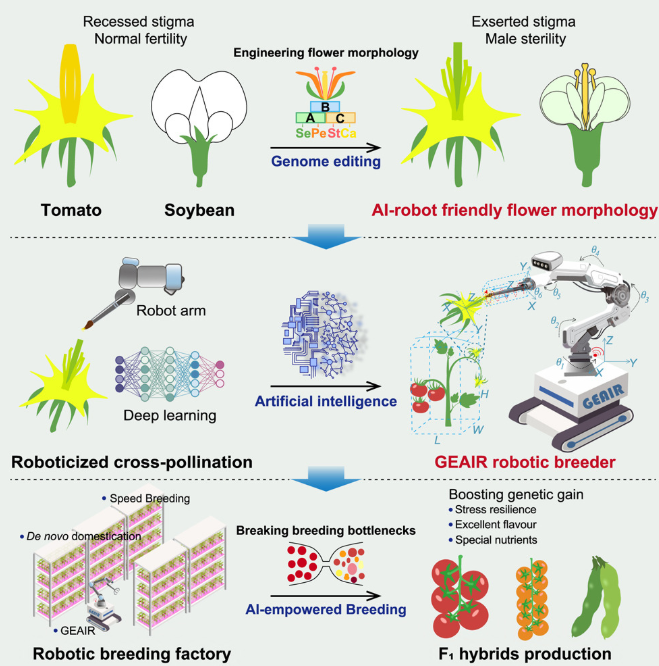
在该研究中,研究人员利用基因组编辑技术重新设计作物花型,培育出了带有外露柱头花朵的雄性不育系,然后训练了一个移动机器人GEAIR来自动识别这些柱头并进行异花授粉。GEAIR实现了自动化的F1代杂交育种,其效率可与人工授粉相媲美;在快速育种条件下,结合从头驯化技术,它还能促进抗逆性强且风味佳的番茄的快速培育。研究人员进一步将GEAIR系统应用于大豆,在大豆中进行的多重基因编辑重现了雄性不育、柱头外露的表型,这有可能为自动化杂交育种开辟道路。本研究展示了GEAIR在通过自动化、快速培育气候适应性作物来提高效率和降低成本方面的潜力。
发表日期:2025-8-11
